
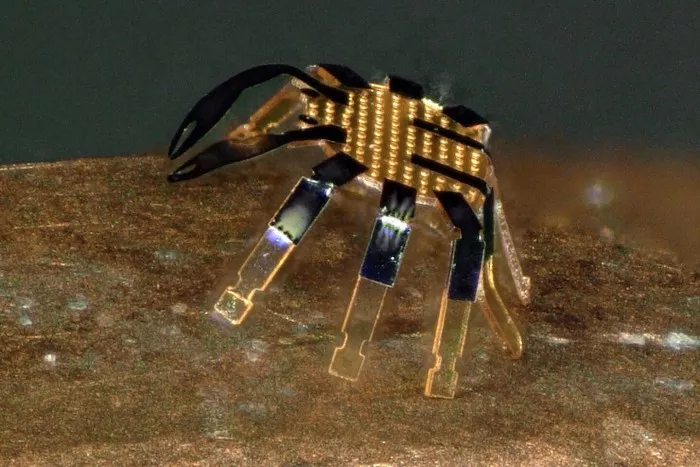
These robots are made of shape memory alloy materials and then deformed into the desired shape. After heating these alloys, they will bounce back to their original shape, and when the heat disappears, a thin glass coating can bounce them back to their deformed shape elastically.
In this case, the heat is provided by the scanning laser, which heats the alloy through "crab". Because they are so small, the speed of heat dispersion is so fast that their reaction speed even reaches 10 times per second, which is surprising. The direction of the laser scanning determines the direction of movement - scanning to the right, "crab" will go to the right - only due to the time of leg movement. The team timed their bodies at half their average speed per second.
Then they tried a number of different geometries, including a water walking tripod structure that can be induced to rotate by a rotating scanning laser, a curl structure that can make small jumps, and other structures that can make twists and other movements.
The manufacturing process is quite attractive - the team made the robots into a flat structure, which is their heating state. They then bonded the planar structure to a stretched rubber matrix, but only at the foot points. The rubber is then relaxed, reducing the footprints of the robots and causing them to pop out of the surface during a controlled buckling process, leaving them in the final three-dimensional "cooling" position, where a glass coating can be applied to maintain their shape until they are heated.

John A. Rogers, a professor of materials science and engineering who led the experiment, said: "Robotics is an exciting research field, and the development of micro scale robots is an interesting academic exploration topic. You may imagine micro robots as agents to repair or assemble small structures or machines in industry, or as surgical assistants to remove blocked arteries, stop internal bleeding or eliminate cancer tumors - all minimally invasive surgery."
Of course, imagining them like this requires us to imagine how to heat targeted lasers into the tiny space they are designed to operate - which is not a simple prospect in the body. So there is still a lot of work to be done.
"With these assembly technologies and material concepts, we can build walking robots of almost any size or three-dimensional shape," Rogers said. "But the students are very inspired and interesting by the little crab's lateral crawling. It's a creative whim."
The study is available in science and robotics 》(Science Robotics) magazine.